教員・研究室紹介

広大な海中や海底のデータを得る手段として、無人・自律型のプラットフォームが注目されています。本研究室では自律型海中ロボット(AUV)を中心に、遠隔操縦ロボット(ROV)や自律ボート(ASV)、海底ステーションといったプラットフォームの連携により、新たな海中海底プラットフォームシステムを提案します。AUVの経路計画やセンサフュージョンによる確率的状態推定、機械学習といったアルゴリズムに加え、推進機構や音響通信・測位技術、非接触充電技術といったハードウェア技術、そして取得したデータの解析手法にいたるまで、総合的なアプローチを行います。現在進行中のプロジェクトには、複数AUVの同時運用手法、海底ステーションとの連携によるAUVの長期展開手法、低コストAUV(水中ドローン)による高効率な調査手法、海中生物の自動探知・追跡手法、AUVによる海氷・棚氷下の観測手法等があります。
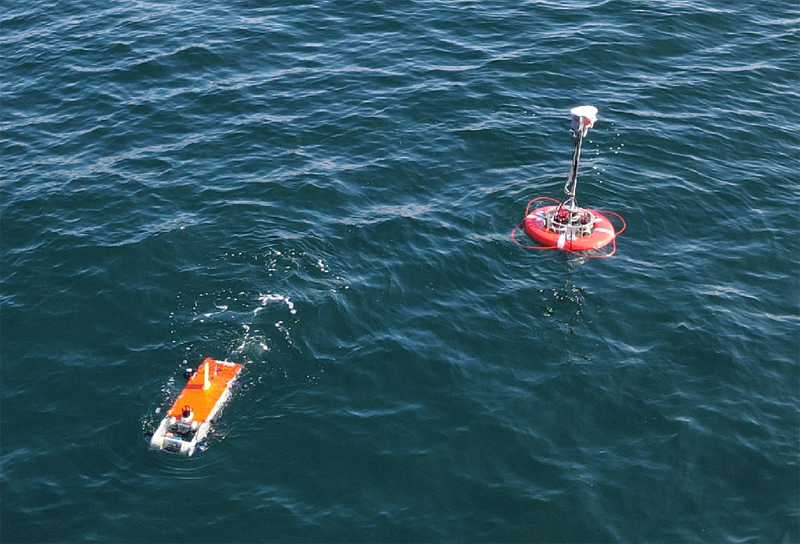
海域試験中のAUV HATTORI(左)および自律ブイBUTTORI(右)

海底を行くAUV Tri-TON

氷海探査用AUV MONACA
Copyright© 2026
東京大学大学院新領域創成科学研究科
海洋技術環境学専攻
All Right Reserved.
Produced by coanet




