Faculty

Autonomous, unmanned platforms have a large potential to obtain data about the vast ocean. We seek to realize novel underwater platform systems to reveal the nature of the ocean. These systems will realize wide-area, high-accuracy, and long-term observation through collaboration of multiple platforms such as autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), autonomous surface vehicles (ASVs), and seafloor stations. Some of the ongoing projects are as follows; collaborative navigation and formation control of multiple AUVs, long-term deployment of AUVs based on seafloor stations, low-cost AUVs, autonomous detection and tracking of marine life, and under-ice observation.
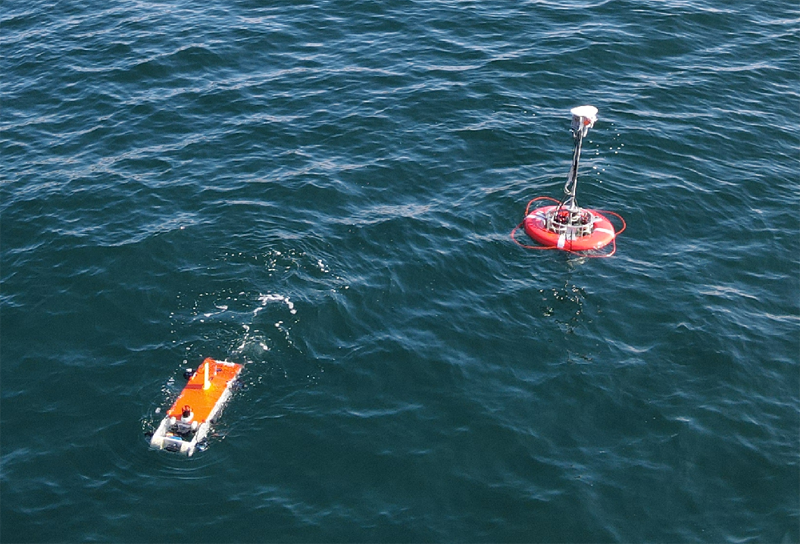
AUV HATTORI (left) and ASV BUTTORI (right) during a sea experiment
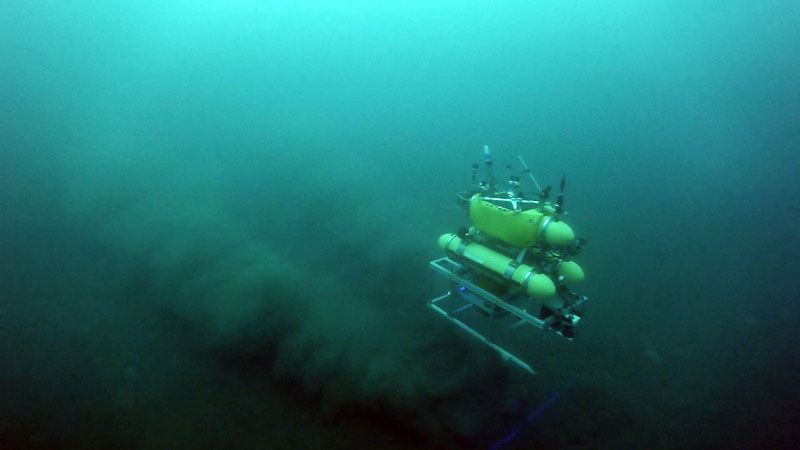
AUV Tri-TON following the seafloor

AUV MONACA for under ice survey




Copyright© 2026
Department of Ocean Technology, Policy, and Environment
All Right Reserved.
Produced by coanet
