プロジェクト

海洋研究開発機構との共同研究(2016~2021年度)
超大深度掘削におけるドリルパイプのダイナミクスに関する研究
資源開発および科学調査において超大深度掘削への期待が集まっていますが、10,000m超の長さを持つドリルパイプを用いた掘削では、ドリルパイプのダイナミクスが無視できなくなり、掘削システムはより複雑な挙動を示します。効率的かつ安全な掘削オペレーションの実現には、掘削井内のリアルタイム挙動推定が必須ですが、操業中にモニタリング可能な情報は限られているという課題があります。本研究では、力学的知見と計測データを最大限活用する挙動推定手法の構築により同課題の解決に取り組んでいます。
本研究の特徴は、力学モデルだけでは記述困難な掘削井内の状況を、実際の掘削操業オペレーションデータと深層学習を活用して推定していく点にあります。掘削エンジニアの知見やシミュレーションモデルの入出力を活用したグレイボックスモデルや異常検知モデルの構築により、力学モデルとデータ科学の双方の利点を融合させたアプローチの実現を目指しています。
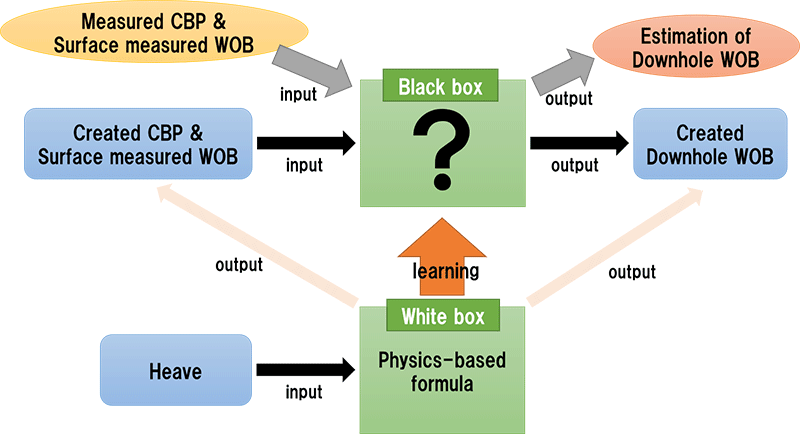
Concept of Gray box model for Downhole WOB Estimation

The Deep-Sea Scientific Drilling Vessel Chikyu, ©JAMSTEC/IODP
Copyright© 2026
東京大学大学院新領域創成科学研究科
海洋技術環境学専攻
All Right Reserved.
Produced by coanet




