学生・若手研究者受賞研究紹介

私は2011年9月にハワイ島のコナで開催されたOCAENS ’11 のStudent Posterに参加し、Second Place Awardを受賞しました。発表は複数の自律型海中ロボットが水中での位置を自己把握するための位置推定手法と、推定精度に関するシミュレーション評価について報告しました。本手法は複数のロボットが連携して自律的に航行し、未知の海底資源探査や遺失物捜索活動、海底生物の観測などを広域にわたって行う上で重要な技術になると考えています。Student Posterには欧米をはじめとする各国の学生が多数参加しているため、海外の研究動向や潮流を肌で感じることができる良い機会となりました。
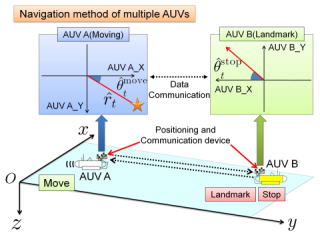
(図の説明)
AUV Aは海底に着底しているAUV Bと相互に音響測位を行い、通信で得られた相互測位情報(相対距離・相対方位)をもとに確率的アプローチにより自己位置を推定する。
Copyright© 2026
東京大学大学院新領域創成科学研究科
海洋技術環境学専攻
All Right Reserved.
Produced by coanet




